Nhóm nhà khoa học khi nghiên cứu robot vỗ cánh đã phát triển một kỹ thuật mới, chế tạo bộ móng vuốt cơ khí, được tự động hóa trên cơ sở Trí tuệ Nhân tạo (AI) cho phép các robot-chim có thể đậu xuống thanh ngang.
Foxconn Đài Loan bán toàn bộ cổ phần của tập đoàn sản xuất chip Trung Quốc Robot bảo dưỡng cánh quạt tuabin gió nhanh gấp 4 lần phương pháp thông thường Mỹ giáng thêm đòn vào ngành chip Trung Quốc, đưa 36 công ty vào danh sách đen.
Hạ cánh và đậu trên cành cây là điều dễ dàng đối với hầu hết các loài chim, nhưng rất khó đối với robot bay như chim vì kích thước lớn hơn và sự phức tạp của việc hạ cánh trên một thanh ngang.
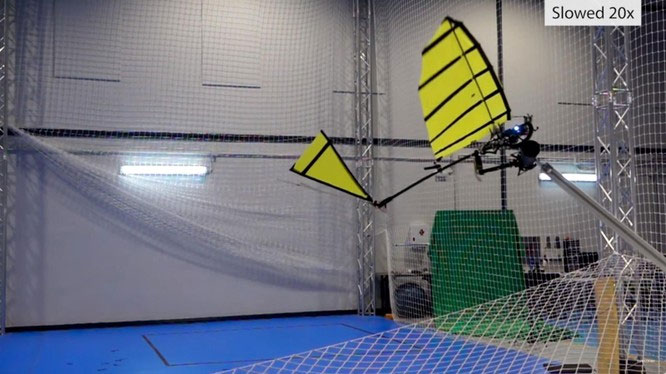 |
| Robot vỗ cánh ornithopter bay và đậu trên thanh ngang. (Ảnh video New Scientist). |
Làm cho robot bay được như chim là một công nghệ, nhưng làm cho robot - chim đậu được như chim lại là vấn đề hoàn toàn khác và khó khăn hơn nhiều. Có rất nhiều yếu tố cần xem xét như tốc độ, thời gian, lực tác động, ước tính khoảng cách và độ cân bằng, v.v. Đó là một động tác phức tạp đến mức không có robot vỗ cánh nào (ornithopter) có thể thực hiện được đến tận bây giờ.
Robot giống chim có móng vuốt, có thể sử dụng để đậu trên những cành cây mà robot bay tới. Phương pháp đậu trên cành cây hoặc vật có khả năng hữu ích cho những hoạt động thu thập các mẫu ở những khu vực khó tiếp cận hoặc âm thầm quan sát động vật trong môi trường sống tự nhiên cũng như nhiều hoạt động khác tương tự như loài chim.
Nghiên cứu sinh sau TS Raphael Zufferey tại Phòng thí nghiệm Hệ thống Thông minh (LIS) và Biorobotics ab (BioRob) thuộc Trường Kỹ thuật Viện Công nghệ Liên bang Thụy Sĩ ở Lausanne đã phát triển một con chim robot (ornithopter) – có sải cánh dài 1,5 mét và nặng 700 gram, có thể sử dụng móng vuốt để đậu trên cành cây trong phòng thí nghiệm sau một chuyến bay ngắn. Ông chế tạo và thử nghiệm robot với sự cộng tác của các đồng nghiệp tại Đại học Seville, Tây Ban Nha, nơi chiếc ornithopter được phát triển như một phần thuộc dự án GRIFFIN của Châu Âu.
“Đây là giai đoạn đầu tiên của một dự án lớn hơn. Sau khi một ornithopter có thể hạ cánh thành thạo hoàn toàn tự động trên cành cây, thì robot-chim có khả năng thực hiện nhiệm vụ cụ thể như thu thập các mẫu sinh học hoặc thực hiện các phép đo hoặc quan sát kín đáo trên cao từ một cành cây. Ngoài ra, ornithopter có thể đáp xuống những cấu trúc nhân tạo hoặc những vị trí khó khăn, mở ra nhiều lĩnh vực ứng dụng hơn nữa,” Zufferey nói.
Theo ông, khả năng hạ cánh trên một thanh ngang có thể cung cấp một phương pháp sử dụng hiệu quả hơn cho ornithopters, tương tự như nhiều phương tiện bay không người lái (UAV) có thời gian sử dụng pin hạn chế, có thể hạ xuống để sạc pin bằng năng lượng mặt trời, cho phép phương tiện bay trở nên lý tưởng cho những nhiệm vụ tầm xa hoặc trong thời gian dài.
TS Zufferey bình luận: “Đây là một bước tiến lớn trong việc sử dụng robot vỗ cánh, hiện chỉ có thể thực hiện các chuyến bay tự do cho những nhiệm vụ phức tạp và những ứng dụng cần thiết trong thế giới thực".
Tối đa hóa sức mạnh và độ chính xác; giảm thiểu trọng lượng và tốc độ
Các vấn đề kỹ thuật liên quan đến khả năng hạ cánh của một ornithopter trên một thanh ngang mà không có bất kỳ mệnh lệnh bên ngoài nào, đòi hỏi phải kiểm soát nhiều yếu tố mà tự nhiên đã cân bằng một cách hoàn hảo. Ornithopter phải có khả năng giảm tốc độ đáng kể khi đậu, nhưng vẫn duy trì trạng thái bay. Móng vuốt phải đủ mạnh để bám vào thanh ngang và giữ được trọng lượng của robot, nhưng không quá nặng khiến robot không bay được lên cao. Ông Zufferey lưu ý: “Đó là một lý do buộc chúng tôi sử dụng một móng thay vì hai móng. Ngoài ra, robot cần có khả năng nhận biết môi trường xung quanh và thanh đậu ngang trước mặt liên quan đến vị trí, tốc độ và quỹ đạo dịch chuyển của thanh ngang".
Các nhà nghiên cứu đã đạt được những kết quả này bằng phương pháp trang bị cho ornithopter hệ thống định vị và máy tính tích hợp trên cơ sở Trí tuệ Nhân tạo (AI), bổ sung một hệ thống ghi lại chuyển động bên ngoài để giúp AI của robot - chim xác định vị trí so với thanh ngang đậu. Phần phụ móng vuốt của ornithopter được hiệu chỉnh tinh vi để bù đắp những dao động lên xuống của chuyến bay khi robot tập trung xác định thanh ngang đậu và nắm bắt. Những móng vuốt nhân tạo này được thiết kế để hấp thụ động lượng di chuyển của robot khi va chạm, đóng khóa nhanh chóng và chắc chắn để chịu được trọng lượng của robot. Sau khi hạ cánh, robot vẫn đậu trên thanh ngang mà không tiêu hao năng lượng.
Thực hiện tất cả những yếu tố này, Zufferey và các đồng nghiệp đã thành công chế tạo được không chỉ một mà là 2 ornithopter có móng vuốt để tái tạo kết quả đậu của robot.
Trong cuộc phỏng vấn với New Scientist, Zufferey giải thích, thủ thuật đạt được kỳ tích đáng kinh ngạc này đòi hỏi một vài bổ sung từ hành vi thực tế của loài chim. Mặc dù móng vuốt lò xo bám vào một thanh ngang đường kính 6 cm giống như nguồn cảm hứng từ động vật học, nhưng cách tiếp cận cuối cùng khác với các đối tác trong thế giới thực. Trong tự nhiên, những con chim bay lơ lửng trên thanh ngang trong giây lát trước khi chạm xuống. Phát minh của Zufferey chỉ đơn giản là bay chậm lại khi gần đến đích cuối cùng, sử dụng các đánh giá của máy ảnh quang học, do đó cho phép thời gian móng vuốt lò xo kích hoạt trong vòng 25 mili giây, theo bài báo về kết quả nghiên cứu, được xuất bản trên Nature Communications.
Trong tương lai, nhóm nghiên cứu của TS Zufferey tiếp tục hoàn thiện và cập nhật công nghệ tự động hóa cho robot – chim có móng vuốt để có thể hoạt động trong môi trường ngoài trời.
“Hiện nay, các thử nghiệm chuyến bay được thực hiện trong nhà, bởi vì chúng tôi cần có một vùng bay được kiểm soát với khả năng định vị chính xác từ hệ thống ghi lại chuyển động. Trong tương lai, chúng tôi muốn tăng cường khả năng tự chủ của robot để thực hiện các nhiệm vụ đậu và hoạt động ngoài trời trong một môi trường phức tạp hơn".
Ornithopter có móng vuốt mới chưa sẵn sàng để sử dụng ngoài trời. Robot hiện chỉ hoạt động “phụ thuộc vào dữ liệu bản địa hóa chính xác từ hệ thống ghi lại chuyển động” và chưa được tối ưu hóa cho các môi trường không thể dự đoán. Nhưng khi những vấn đề đó được giải quyết, các nhà nghiên cứu tin rằng robot-chim có thể thực hiện rất nhiều nhiệm vụ ở những vị trí khó tiếp cận hoặc theo dõi động vật nhạy cảm với tiếng ồn trong tự nhiên cho mục đích nghiên cứu.
Theo khoahoc.tv





Thông tin bạn đọc
Đóng Lưu thông tin